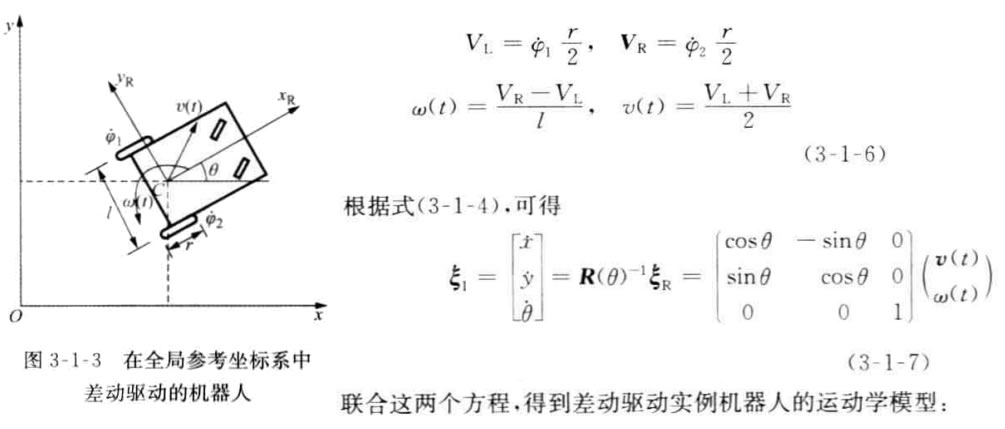
Ž╚Ż¼╬ęéāėæšō╚ńłD3-1-3╦∙╩ŠĄ─ļp▌å▓Ņ╦┘“īäėĄ─ęŲäėÖCŲ„╚╦Ą─▀\äėīW─Żą═Ż¼ ╝┤ėæšōĮoČ©ÖCŲ„╚╦Ą─Äū║╬╠žš„║═╦³Ą─▌åūė╦┘Č╚║¾Ż¼ÖCŲ„╚╦Ą─▀\äėĘĮ│╠ĪŻ
╚ńłD3-1-3╦∙╩ŠŻ¼╝┘įOįō▓Ņäė“īäėĄ─ÖCŲ„ ╚╦Šų▓┐ū°ś╦ŽĄįŁ³cC ╬╗ė┌ā╔▌åųąą─Ż¼▓óŪęC ³c ┼cÖCŲ„╚╦ųžą─ųž║ŽŻ¼Šų▓┐ū°ś╦ŽĄųąyg ▌S┼cÖC Ų„╚╦ā╔▌å▌SŠĆŲĮąąŻ¼┼c▄ć¾wš²Ū░ĘĮ┤╣ų▒Ż╗xR▌S ┼c╚½Šųū°ś╦ŽĄx ▌SŖAĮŪ×ķ”╚ĪŻÖCŲ„╚╦ėą2éĆų„äė▌åūėŻ¼Ė„Š▀ų▒ÅĮr, ā╔▌å▌åķgŠÓ×ķlĪŻ
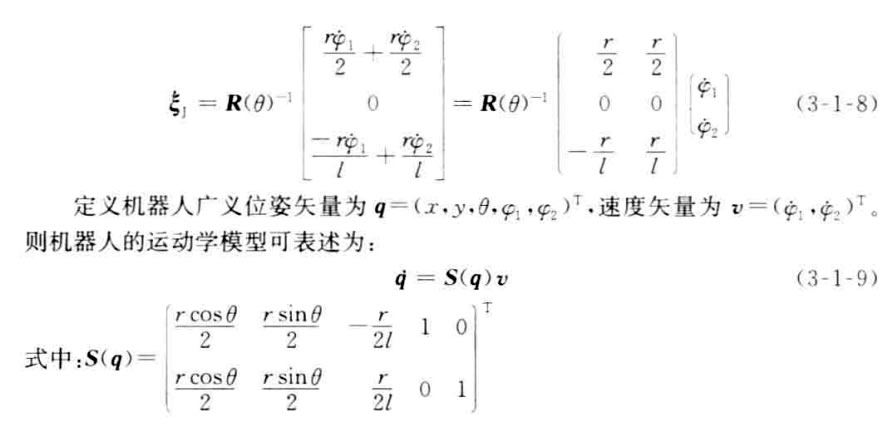
╝┘Č©ÖCŲ„╚╦į┌▀\äėųą┘|ą─Ą─ŠĆ╦┘Č╚×ķv(t), ĮŪ╦┘Č╚×ķw(t), ū¾ėęā╔▌åĄ─▐D╦┘Ęųäe×ķ”ū║═ ųą₂,ÖCŲ„╚╦ū¾ėęā╔▌åĄ─▀\äė╦┘Č╚Ęųäe×ķ VI, VRĪŻĮoČ©r,1,”╚, ęį╝░Ė∙ō■łD3-1-3╦∙╩ŠĄ─Äū ║╬ĻPŽĄŻ¼┐╝æ]ĄĮęŲäėÖCŲ„╚╦ØMūŃäé¾w▀\äėęÄ ┬╔Ż¼Ž┬├µĄ─▀\äėīWĘĮ│╠(3-1-6)│╔┴óĪŻ
¤oųąķg£p╔┘é„äėŁh╣Ø╗“ć¦║ŽŁh╣Ø,Č©╬╗£╩┤_;¤oŽÓī”─”▓┴,£p╔┘▓╗▒žę¬Ą──źōp║═╣”┬╩ōp╩¦;ÖCŲ„╚╦╦┘Č╚┐ņ,┴”┴┐┤¾,ī”┐╣ąįÅŖ;¤oŽÓī”─”▓┴,čėķL┴╦▌å▌Sē█├³;▒Żūo┴╦ļŖÖCŻ¼┐╣ø_ō¶ąį║├
▄ć▌å╩Ū▌å╩ĮęŲäėÖCŲ„╚╦Ą─ęŲäėÖCśŗ,
ę└ō■═©▀^3▌S(X,Y,Z) Ė„ūįĄ─╝ė╦┘Č╚Öz£y║═Öz£yĖ„▌SŽÓī”╗∙£╩Ą─▐DĮŪŲ½▓ŅĄ─æTąįī¦║ĮŽĄĮyüĒŪ¾ĮŌ;ė├╦┘Č╚═ė┬▌āxĄ╚Ū¾Ą├├┐å╬╬╗ĢrķgĄ─ęŲäėŠÓļx║═å╬╬╗ĢrķgĄ─ĘĮ╬╗ūā╗»Ż¼ėŗ╦Ń│÷├┐éĆĢr┐╠Ą─╬╗ų├║═ĘĮ╬╗
ÖCŲ„╚╦Ą─┤¾─XĄ─ū„ė├ų„ę¬╩Ūßśī”«öŪ░šZ┴xĪó╬─ūųĄ─└ĒĮŌūRäe│÷╚╬äš─┐ś╦, ▓óĮY║Ž▌ö╚ļĄ─łDŽ±ą┼Žó,į┌ŁhŠ│ųąūRäe│÷▓┘ū„ī”Ž¾;ū÷│÷║Ž└ĒĄ─ųĖ┴Ņ╚╬äš═Ųī¦,▓ó╔·│╔ąĪ─XĄ─ł╠ąąųĖ┴Ņ
╚ń║╬īŹĢrĪ󊽣╩Ė·█Ö─®Č╦ł╠ąąŲ„┼c▒╗▓┘ū„╬’¾wų«ķgĄ─┐šķgŠÓļx║═╬╗ų├ą┼Žó;╚ń║╬š²┤_▀xō±Ė·Į╗╗ź╬’¾wĄ─▓┘ū„╬╗ū╦;ÖCŲ„╚╦į┌īŹļH▓┘ū„ųą½@╚ĪūŅā×ūź╚Īū╦æB║═╬╗ų├Ą──▄┴”
╩ųč█ģf═¼─▄═©▀^ęĢėXū÷║├ī”ņ`Ū╔╩ų╬╗ų├Ą─┼ąöÓĪóäėū„Ą─ęÄäØ╝░┼c╬’¾wĮ╗╗ź▓▀┬į┼ąČ©,▓ó─▄ē“Ė∙ō■╩ųĄ─é„ĖąŲ„ą┼Žó,┼ąöÓ┴”Ą─┤¾ąĪĘĮŽ“╩Ūʱ║Ž▀m,Å─Č°┤¾Ę∙╠ß╔²Č©Ž“ūź╚Ī▓┘ū„Ą─│╔╣”┬╩
ļp╩ųņ`Ū╔┼õ║Ž┐╔═Ļ│╔Š▀ėą╔·╬’▀\äė╠žš„Ą─ć·ĮĒ┼Õ┤„╚╬äš;ņ`Ū╔╩ųŠ½£╩ł╠ąąŠŲ▒Ł║═ŠŲŲ┐Ą─ūź╬šŻ¼ļp▒█+ļp╩ųģf═¼═Ļ│╔Ą╣ŠŲ▓┘ū„;ī”╚š│Ż▒ŻØŹ╣żū„Ą─Ė▓╔w,░³└©į┌╩ęā╚ł÷Š░č▓║Į,ßśī”ąl╔·ķgĪó▓═ū└Ą╚ł÷Š░Ą─▒ŻØŹ▓┘ū„
┤¾ęÄ─Żæ¬ė├ł÷Š░▓╗ūŃŻ¼æ¬ė├ł÷Š░ų▒Įėė░ĒæÖCŲ„╚╦ąĶŪ¾Ą─äéąį│╠Č╚;╚╦ą╬ÖCŲ„╚╦ÖCśŗÅ═ļsŻ¼ųŲįņ│╔▒ŠĖ▀░║Ż¼│╔▒Š┐žųŲėą┘ćė┌┤¾ęÄ─Ż╔·«aĄ─╗∙ĄA╝░ČÓĘĮ╬╗Ą─╝╝ąg
Š▀╔ĒųŪ─▄░³║¼Š▀╔ĒĖąų¬ĪóŠ▀╔ĒŽļŽ¾║═Š▀╔Ēł╠ąą╚²éĆ─ŻēK,Ė„īW┐ŲŽÓī”│╔╩ņĄ─Ęe└█×ķŠ▀╔ĒųŪ─▄▀Mę╗▓Į░lš╣╠ß╣®╗∙ĄA,═©▀^ČÓ─Żą═ė¢ŠÜ,į┌ČÓé„ĖąŲ„║Žū„Ž┬═Ļ│╔╚╬äšł╠ąą
īW┴ĢĘĮĘ©:┼įė^ą═īW┴Ģ,īŹ█`ąįīW┴Ģ;╔├ķLŅIė“:ųŪ─▄ųą▒Ēš„┼cėŗ╦ŃĄ─▓┐Ęų,ų„äė╩ĮĖąų¬,ł╠ąą╬’└Ē╚╬äš;Ėąų¬ĘĮĘ©:▒╗äėĮė╩▄öĄō■,ų¦│ų┼c═ŌĮńĮ╗╗ź
╚╦ą╬ÖCŲ„╚╦╩ųųĖĻP╣ØąĶ┼õéõĖ³ČÓąĪą═╗»Ūę─▄ē“▌ö│÷▌^┤¾┴”Ą─ļŖÖC,ī┘ė┌ų▒┴„ė└┤┼╦┼Ę■ļŖäėÖCĄ─┐šą─▒ŁļŖÖC═Ļ├└Ų§║Ž╚╦ą╬ÖCŲ„╚╦ī”æ¬╩ųųĖĻP╣Ø▌p┴┐╗»,Ė▀Š½Č╚Ą╚ąĶŪ¾;
ś╦£╩╩ĮąąąŪØLų∙ĮzĖ▄╩Ūīó┬▌ą²▀\äė║═ąąąŪ▀\äėĮY║Žį┌ę╗Ų,ąąąŪØLų∙ĮzĖ▄Š▀ėą│ą▌d─▄┴”ÅŖ,äéČ╚┤¾,Š½Č╚Ė▀,─═─źōp,─═ø_ō¶║═ē█├³ķLĄ╚╠ž³c