
ųŪ─▄ęŲäėÖCŲ„╚╦«aśIĄ─║╦ą─“īäė┴”üĒūį╝╝ągäōą┬Ą³┤·Īó ł÷Š░ąĶŪ¾▒¼░lĪó š■▓▀┘Y▒Šų·═ŲĪó «aśIµ£│╔╩ņČÓš▀Ą─ģf═¼ū„ė├ĪŻ╬┤üĒ, ļSų°Al┤¾─Żą═ĪóŠ▀╔ĒųŪ─▄ (Embodied AI)Ą╚╝╝ągĄ─═╗ŲŲ, ÖCŲ„╚╦īóÅ─å╬ę╗╣”─▄╣żŠ▀" Ž“ " ūįų„øQ▓▀¾wn▀M╗», ▀Mę╗▓ĮØB═Ėų┴╔·«a┼c╔·╗ŅĄ─╚½ł÷Š░ĪŻ
1 ╝╝ąg“īäė: äōą┬═╗ŲŲ╝ė╦┘«aśI╗»
╚╦╣żųŪ─▄┼cÖCŲ„īW┴Ģ
é„ĖąŲ„┼cĖąų¬╝╝ąg
5G┼c▀ģŠēėŗ╦Ń
─ŻēK╗»┼c╚ßąįįOėŗ
2 š■▓▀ų¦│ų: æ┬į┼c┘Y▒ŠāAą▒
«aśIš■▓▀Ę÷│ų
┘YĮ┼cČÉ╩š╝żäŅ
ś╦£╩┼cĘ©ęÄ═Ļ╔Ų
3 ╩ął÷ąĶŪ¾: ČÓŅIė“ł÷Š░▒¼░l
ųŲįņśI╔²JąĶŪ¾
╬’┴„┼cé}ā”ūįäė╗»
Ę■äšÖCŲ„╚╦ł÷Š░öUš╣
╠žĘNŅIė“äéąĶ
4 ╔ńĢ■ę“╦ž: ä┌äė┴”ĮYśŗąįūāĖ’
╚╦┐┌└Ž²g╗»┼cė├╣ż│╔▒Š╔Ž╔²
ę▀Ūķ┤▀╗»¤oĮėė|ĮøØ·
┐╔│ų└m░lš╣ąĶŪ¾
5 ┘Y▒Š┼c╗»:┘Yį┤š¹║Ž“īäėį÷ķL
’LļU═Č┘Y
╗Ņ▄S▓ó┘Å┼cæ┬į║Žū„
╗»╩ął÷═žš╣
6 «aśIµ£│╔╩ņ:ģf═¼ą¦æ¬’@¼F
ė▓╝■╣®æ¬µ£═Ļ╔Ų
▄ø╝■╔·æBķ_Ę┼╗»
┐ńĮń╚┌║Ž╝ė╦┘
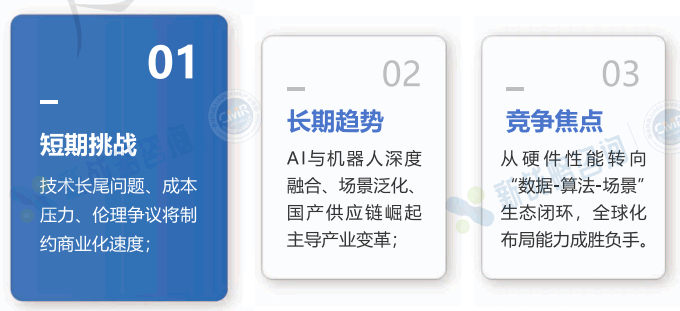
Č╠Ų┌üĒ┐┤, ╣żśIł÷Š░Ą─╔ŅČ╚ØB═Ė┼cĘ■äšÖCŲ„╚╦Ą─ł÷Š░┴čūāīóų„ī¦į÷ķL; ķLŲ┌Č°čį, ╚╦ą╬ÖCŲ„╚╦Ą─┴┐«a═╗ŲŲ┼cŠ▀╔ĒųŪ─▄Ą─╔·æBśŗĮ©īóųž╦▄«aśIĖ±ŠųĪŻ Ų¾śIąĶŠ█Į╣╝╝ąg╔ŅĖ¹┼cł÷Š░┤╣ų▒╗», į┌│╔▒Š┐žųŲĪó ║ŽęÄ▀\ĀI┼c╗»▓╝Šųųąīżšę▓Ņ«É╗»ĖéĀÄā×ä▌, ĘĮ─▄į┌▀@ł÷ųŪ─▄╗»Ė’├³ųąš╝ō■Ž╚ÖCĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |