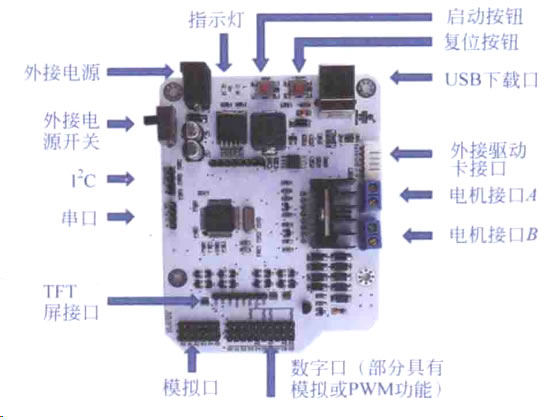
(1) ═ŌĮėļŖį┤ķ_ĻPĪŻ┐žųŲ═ŌĮėļŖį┤╣®ļŖĄ─═©ĪóöÓĪŻ
(2) ═ŌĮėļŖį┤ĪŻ╩╣ė├═Ō▓┐ļŖį┤╣®ļŖĄ─▓ÕŅ^ĪŻ
(3) ųĖ╩Š¤¶ĪŻ╣▓ėąā╔éĆųĖ╩Š¤¶Ż¼Å─ū¾ĄĮėęę└┤╬▒Ē╩ŠŻ║ļŖį┤═©öÓŻ¼Ž┬▌d║¶╬³¤¶ĪŻ
( 4 ) åóäė░┤Ōo ĪŻ ▀\ ąą │╠ ą“ ĪŻ
( 5 ) Å═╬╗░┤Ōo ĪŻ ų„ ░Õ Å═ ╬╗ ĪŻ
(6) USB Ž┬▌d┐┌ĪŻ▀BĮėUSB ŠĆŽ┬▌d│╠ą“Ż¼═¼Ģr┐╔ęįÅ─USB Įė┐┌╣®ļŖĪŻ
(7) ═ŌĮė“īäė┐©Įė┐┌ĪŻ╠ß╣®┴∙ŠĆ“īäėą┼╠¢Ż¼┐╔═ŌĮė“īäė┐©ĪŻ
(8) ļŖÖCĮė┐┌A ĪŻ╠ß╣®ā╔ŠĆĮė┐┌▀BĮėļŖÖCĪŻ
(9) ļŖÖCĮė┐┌B ĪŻ╠ß╣®ā╔ŠĆĮė┐┌▀BĮėļŖÖCĪŻ
(10) öĄūųĮė┐┌(▓┐ĘųŠ▀ėą─ŻöM╗“PWM ╣”─▄)ĪŻ╠ß╣®öĄūųą┼╠¢Ą─▌ö╚╦▌ö│÷╣”─▄Ż¼▓┐Ęų Įė┐┌Š▀ėą▌ö╚ļ─ŻöM┴┐╗“▌ö│÷PWM ą┼╠¢╗““īäėȵÖCĄ─╣”─▄ĪŻ
( 11 ) ─Ż öM Įė ┐┌ ĪŻ ╠ß ╣® ─Ż öM ą┼ ╠¢ Ą─ ▌ö ╚╦ ╣” ─▄ ĪŻ
(12) TFT Ų┴Įė┐┌ĪŻ╠ß╣®128Ī┴160┤¾ąĪĄ─TFT Ų┴“īäėą┼╠¢ĪŻ
(13) ┤«┐┌ĪŻė▓╝■┤«┐┌ĪŻ
(14) I²C ĪŻ ė▓ ╝■I²CĪŻ
ÖCŲ„╚╦į┌D3 Č╦┐┌░▓čbę╗éĆ╬óė|ķ_ĻPé„ĖąŲ„Ż¼į┌D2 Č╦┐┌╔Žčb╔Žę╗éĆ └^ļŖŲ„Ż¼▓óŪę═©▀^╦³“īäėę╗éĆų▒┴„ąĪļŖÖC;į┌░▓čbÅ═č█é„ĖąŲ„Ą─Ģr║“šł═¼īWéāąĪą─ĮėŠĆĄ─Ēśą“
Å═č█é„ĖąŲ„╩Ūė╔│»Ž“5éĆ▓╗═¼ĘĮŽ“Ą─╝t═ŌŠĆ╠ĮŅ^ĮM│╔Ą─é„ĖąŲ„ļŖ┬Ę,╗čµ╦∙░l│÷Ą─╣Ōųą╝t═ŌŠĆ╩Ū║▄ų„ꬥ─│╔Ęų,ÖCŲ„╚╦┐╔ęįĖ∙ō■▀@ĘĮŽ“ą┼Žó╔·│╔ļŖÖC┐žųŲųĖ┴Ņ,│»ų°╗į┤Ū░▀M
ÖCŲ„╚╦Č╝ąĶę¬═Ļ│╔──ą®╣żū„Ż║č▓ŠĆĪó═©▀^Ė„ĘN┬Ę┐┌Īóį┌ ąČžø╦■(šŽĄK╬’)Ū░═ŻŽ┬Īó“īäėÖCŲ„╚╦Ą─▀\žøÖCśŗ(ÖCŲ„╚╦Ą─╩ų▒█)ąČ▌džø╬’Īó▐D╔Ē╗ž╝ę,▀MąąŽ┬▌d║═š{įć
īóȵÖCė├Įī┘╝■░▓čbĄĮÖCŲ„╚╦Ąū▒P╔Žū„×ķ╦³Ą─╩ų▒█ĪŻ╬ęéā╩ūŽ╚ųŲū„ų╗╩Ū╩╣ė├ę╗ų╗ȵÖCŻ¼ōĒėąę╗éĆĻP╣ØĄ─ÖCŲ„╚╦╩ų▒█Ż¼▓óīóȵÖC▀BĮėĄĮėąPWM ▌ö│÷╣”─▄Ą─9╠¢Č╦┐┌
░čȵÖC▓ÕĄĮų„┐žųŲ░ÕĄ─9╠¢Č╦┐┌╔ŽŻ¼╚╗║¾ūī╦³į┌0ĪŃ~180ĪŃų«ķg▓╗ ═ŻĄžĘ┤Å═▀\äė;īóȵÖC▓ÕĄĮ╚╬║╬ę╗éĆėąPWM ╣”─▄Ą─Č╦┐┌╔Ž,ȵÖC▐DäėĄĮ──éĆĮŪČ╚Ż¼Š═ė├ų„┐ž░Õ░l│÷─ŪéĆĮŪ Č╚╦∙ī”欚╝┐š▒╚Ą─PWM ą┼╠¢Š═┐╔ęį
ÖCŲ„╚╦Ą─ȵÖC╩Ūį┌ų▒┴„£p╦┘ļŖÖCĄ─╗∙ĄA╔Žį÷╝ė┴╦ę╗éĆÖz£y╬╗ų├Ą─╬óą═é„ĖąŲ„║═ę╗éĆ┐žųŲŲ„ĮM│╔Ą─ķ]ŁhĘ┤ü┐žųŲŽĄĮyŻ¼Å─Č°īŹ¼Fī”ļŖÖC▐Däė╬╗ų├Ą─Š½┤_┐žųŲ
╩ūŽ╚īóÖCŲ„╚╦ĪóöUš╣░Õ║═Ąž├µ╗ęČ╚Öz£yé„ĖąŲ„─ŻēK▀BĮė║├,Ąž├µ╗ęČ╚Öz£yé„Ėą Ų„▀BĮėĄĮA0Ī½A3 Č╦┐┌ĪŻ╝t═Ō▒▄šŽé„ĖąŲ„▀BĮėĄĮD3 Č╦┐┌,╩Š└²│╠ą“ųąĮo│÷Ą─┐╔─▄ę▓▓╗╩ŪūŅ║├Ą─ĮŌøQĘĮ░Ė
╝t═Ō▒▄šŽé„ĖąŲ„ė╔ę╗éĆ╣ŌŠĆ░l╔õčbų├║═ę╗éĆ╣ŌŠĆĮė╩ščbų├ĮM│╔Ą─,╦³Ą─╣ŌŠĆ░l╔õĘĮŽ“╩Ū│»Ž“▀\äėĄ─ĘĮŽ“Č°▓╗╩ŪĄž├µŻ¼Č°Ūę░l╔õčbų├░l│÷Ą─╣Ō╩Ū╝t═Ō╣ŌČ°▓╗╩Ū┐╔ęŖ╣Ō
▓ó┼┼░▓čb4éĆĄž├µ╗ęČ╚é„ĖąŲ„,ė├Č┼░Ņ▀BĮėŠĆ░č╦³éā░┤Ēśą“Ęųäe ▀BĮėĄĮų„┐ž░ÕĄ─A0Ī½A3 Č╦┐┌,ŲõųąūŅū¾Č╦Ą─é„ĖąŲ„▀BĮėA0┐┌,ūŅėęČ╦Ą─▀BĮėA3┐┌,ų╗ę¬╩ŪūŅū¾╗“ūŅėęČ╦Ą─é„ĖąŲ„Öz£yĄĮ┴╦ ║┌ŠĆŻ¼Š═┤·▒ĒÖCŲ„╚╦ė÷ĄĮ┴╦┬Ę┐┌
į┌╩╣ė├ pinMode ├³┴Ņ×ķČ╦┐┌ęÄČ©ĘĮŽ“Ģr┐ŽČ©ę¬ė├ĄĮ╦³Ą─ŠÄ╠¢Ż¼╚╗║¾į┘ė├ digitalRead ų«ŅÉĄ─├³┴Ņ▓┘┐vČ╦┐┌Ģrę▓ę¬ė├ĄĮ═¼ę╗éĆŠÄ╠¢,ė├analogRead ├³┴ŅūxĄĮ┴╦é„ĖąŲ„«öŪ░Ą─ųĄ
ÖCŲ„╚╦é„ĖąŲ„Ą─╬╗ų├į┌┐┐Į³║┌ŠĆĄ─ū¾é╚╗“š▀š²║├į┌║┌ŠĆ╔Ž;digitalRead ĪódigitalWrite ĪóanalogRead ĪóanalogWriteĪó pinMode ĪódelayĪŻ╦³éāśŗ│╔┴╦Arduino ųąūŅ×ķųžę¬ĪóūŅ×ķ│Żė├Ą─╣”─▄
╬óė|ķ_ĻPę▓ų╗ėąĪ░ķ_Ī▒║═Ī░ķ]Ī▒ ā╔ĘN▓╗═¼Ą─ĀŅæB,░č╦³▀BĮėĄĮų„┐žųŲŲ„Ż¼ė├│╠ą“Š═─▄║▄£╩┤_ĄžÖz£yĄĮ╦³Ą─ķ_ķ]ūā╗»┴╦,ų╗ę¬ė├ digitalRead ├³┴ŅŠ═┐╔ęį║▄ ĘĮ▒ŃĄžūx╚Ī╬óė|ķ_ĻPĄ─ųĄ┴╦Ż¼▀@éĆ├³┴ŅĄ─ė├Ę©