| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
¤ßļŖūĶ╩ŪļŖūĶųĄļS£žČ╚ūā╗»Ą─ę╗ĘN£žČ╚Öz£yį¬╝■ĪŻ╦³Ą─£y£žįŁ└Ē╩Ū╗∙ė┌ī¦¾w╗“░ļī¦¾wĄ─ļŖūĶųĄļSų°£žČ╚Ą─ūā╗»Č°ūā╗»Ą─╠žąįĪŻ
¤ßļŖūĶ╩ŪųąĄ═£žģ^Z│Żė├Ą─ę╗ĘN£žČ╚Öz£yŲ„Ż¼▀mė├ĘČć·-200Īµ~500ĪµĪŻ ╦³Ą─ų„ę¬╠ž³c╩Ū£y┴┐Š½Č╚Ė▀Ż¼ąį─▄ĘĆČ©ĪŻŲõųąŃK¤ßļŖūĶĄ─£y┴┐£╩┤_Č╚╩ŪZĖ▀ Ą─Ż¼╦³▓╗āHÅVĘ║æ¬ė├ė┌╣żśI£y£žŻ¼Č°Ūę▒╗ųŲ│╔ś╦£╩Ą─╗∙£╩āxĪŻ¤ßļŖūĶ┤¾Č╝ė╔╝ā Įī┘▓─┴ŽųŲ│╔Ż¼─┐Ū░æ¬ė├ZČÓĄ─╩ŪŃK║═Ń~Ż¼┤╦═ŌŻ¼¼Fį┌ęčķ_╩╝▓╔ė├µćĪóÕi║═ŃÖ Ą╚▓─┴ŽųŲįņ¤ßļŖūĶĪŻ
ė╔ė┌ŃKļŖūĶ╬’└ĒĪó╗»īWąį─▄į┌Ė▀£ž║═č§╗»ąįĮķ┘|ųą║▄ĘĆČ©Ż¼╦∙ęįį┌╣żśIĪó āxŲ„āx▒ĒĄ╚ŅIė“Č╝╩▄ĄĮÅVĘ║Ą─æ¬ė├ĪŻŃKļŖūĶ£žČ╚ėŗį┌-256.34Īµ~630.74Īµ £žė“ā╚Ż¼┐╔ū„╗∙£╩£žČ╚Ų„ė├ĪŻ
į┌£y┴┐Š½Č╚▓╗╠½Ė▀Ż¼£y£žĘČć·▓╗┤¾Ą─ŪķørŽ┬Ż¼┐╔ęį▓╔ė├Ń~ļŖūĶüĒ┤·╠µŃKļŖ ūĶŻ¼▀@śė┐╔ęįĮĄĄ═│╔▒ŠŻ¼═¼Ģrę▓─▄▀_ĄĮŠ½Č╚ę¬Ū¾ĪŻ
╔Ž╩÷ā╔ĘN¤ßļŖūĶī”ė┌Ą═£ž║═│¼Ą═£ž£y┴┐ąį─▄▓╗└ĒŽļŻ¼Č°Ń¤ĪóÕiĪó╠╝Ą╚¤ßļŖ ūĶ▓─┴Žģs╩Ū£y┴┐Ą═£ž║═│¼Ą═£žĄ─└ĒŽļ▓─┴ŽĪŻ
1. ѤļŖūĶ
ė├ 99.999 %Ė▀╝āČ╚Ą─ѤĮz└@│╔ļŖūĶŻ¼┐╔į┌╩ę£žų┴4.2 K £žČ╚ĘČć·ā╚╩╣ė├ĪŻ īŹ“×ūC├„Ż¼į┌4.2Ī½15K £žČ╚ĘČć·ā╚Ż¼Ń¤ļŖūĶņ`├¶Č╚▒╚ŃKļŖūĶĖ▀10▒ČŻ╗Ųõ╚▒³c╩Ū▓─┴Ž▄øŻ¼Å═ųŲąį▓ŅĪŻ
2. ÕiļŖūĶ
ÕiļŖūĶį┌2Ī½63 K £žČ╚ĘČć·ā╚Ż¼ļŖūĶļS£žČ╚ūā╗»┤¾Ż¼ņ`├¶Č╚Ė▀Ż╗╚▒³c╩Ū▓─ ┴Ž┤ÓŻ¼ļy└Ł│╔ĮzĪŻ
3. ╠╝ļŖūĶ
╠╝ļŖūĶ▀mė├ė┌ę║║ż£žė“Ą─£žČ╚£y┴┐Ż¼ŲõārĖ±Ą═┴«Ż¼ī”┤┼ł÷▓╗├¶ĖąŻ¼Ą½¤ßĘĆ Č©ąį▌^▓ŅĪŻ
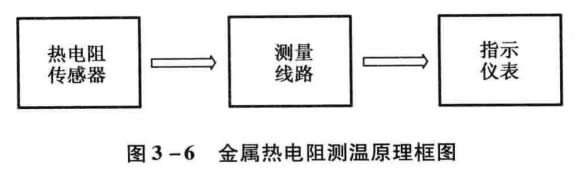
▓╔ė├¤ßļŖūĶū„×ķ£y£žį¬╝■ĢrŻ¼╩Ūīó£žČ╚Ą─ūā╗»▐D╗»×ķļŖūĶĄ─ūā╗»Ż¼łD3-6 Įo│÷┴╦Įī┘¤ßļŖūĶ£y£žĄ─įŁ└Ē┐“łDĪŻ
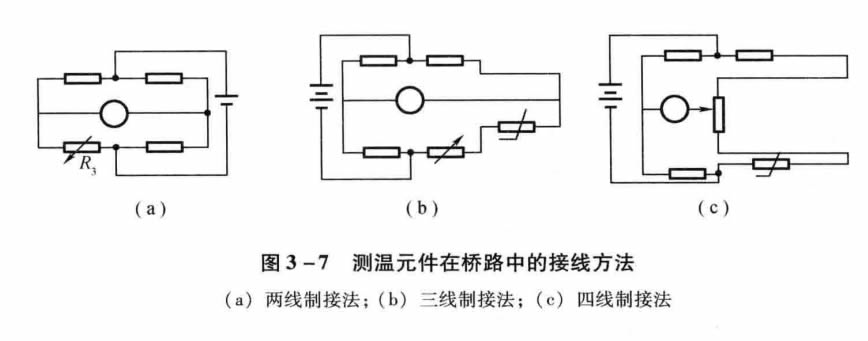
£y£žį¬╝■į┌╣żśI£y┴┐ųąČÓ▓╔ė├ā╔ŠĆųŲ║═╚²ŠĆųŲĮėĘ©Ż¼į┌īŹ“×╩ęČÓ▓╔ė├╦─ŠĆ ųŲĮėĘ©ĪŻā╔ŠĆųŲĮėĘ©╚ńłD3-7 (a) ╦∙╩ŠŻ¼¤ßļŖūĶé„ĖąŲ„Ą─Ėą£žį¬╝■ė├ā╔Ė∙ę²│÷ŠĆŻ¼ę²│÷ŠĆĄ─ļŖūĶųĄįĮąĪįĮ║├ĪŻį┌┐╔─▄ŪķørŽ┬æ¬▒M┴┐▓╔ė├╚²ŠĆųŲĮėĘ©Ż¼ĮėĘ© ╚ń łD 3 - 7(b) ╦∙╩ŠŻ¼ā╔Ślę²ŠĆļŖūĶĘųäe╝ėĄĮļŖś“Ą─ŽÓÓÅś“▒█Ż¼«ö£žČ╚ūā╗» ĢrŻ¼ų╗ę¬╦³éāĄ─ķLČ╚║═ļŖūĶ£žČ╚ŽĄöĄŽÓĄ╚Ż¼╦³éāĄ─ļŖūĶūā╗»Š═▓╗Ģ■ė░ĒæļŖś“Ą─ ĀŅæBŻ¼Ą½┴Ń╬╗š{╣ØļŖūĶR₃ Ą─ė|³cĄ─Įėė|ļŖūĶ║═ļŖś“▒█Ą─ļŖūĶŽÓ▀BŻ¼┐╔─▄ī¦ų┬ ļŖś“Ą─┴Ń³c▓╗ĘĆĪŻ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äšÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ š╣ÅdÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖCŲ„╚╦ ųŪ─▄┼õ╦═ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |