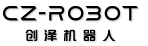

į┌ŽĄĮy(t©»ng)Į©─ŻĄ─▀^│╠«ö(d©Īng)ųąŻ¼ĻP(gu©Īn)µIąįå¢Ņ}Š═╩ŪĮ©┴óĄ──Żą═ꬊC║Ž┐╝æ]ĄĮŲõČÓ├µąįĪó ╝»ųąąįŻ¼Ūę─▄ē“£╩(zh©│n)┤_ĄžĘ┤ė││÷ŽĄĮy(t©»ng)Ą─▒Š┘|(zh©¼)╠ž³c(di©Żn)ĪóŽĄĮy(t©»ng)╦∙╠Äį┌Ą─ĀŅæB(t©żi)ęį╝░░l(f©Ī)╔·Ą─ūā╗» ęÄ(gu©®)┬╔ĪŻį┌ę╗ą®īŹ(sh©¬)ļHå¢Ņ}ųąŻ¼─▄ē“ų▒Įė▓╔ė├öĄ(sh©┤)īW(xu©”)╣½╩Įīó╩┬╬’╝ėęį├Ķ╩÷Ą─╩ŪĘŪ│Żėą Ž▐Ą─Ż¼Č°Ūęį┌║▄ČÓĀŅørŽ┬Ż¼īóīŹ(sh©¬)ļHå¢Ņ}┼c─Żą══Ļ╚½ŽÓ═¼ę▓╩Ū▓╗ŪąīŹ(sh©¬)ļHĄ─ĪŻŽĄĮy(t©»ng)ĮY(ji©”)śŗ(g©░u) ║═ÖC(j©®)└Ē«ö(d©Īng)ųąĄ─ę╗éĆ(g©©)│ķŽ¾Š═╩ŪŽĄĮy(t©»ng)Ęų╬÷Ž┬Ą─öĄ(sh©┤)īW(xu©”)─Żą═Ż¼«ö(d©Īng)ę╗ą®Ū░╠ߌl╝■Ą├ĄĮØMūŃĢr(sh©¬)Ż¼ ├Ķ╩÷│÷üĒĄ──Żą═▓┼Ģ■(hu©¼)Ė³╝ė┘NĮ³īŹ(sh©¬)ļHĪŻ╦∙ęįŻ¼Į©─ŻĄ─▀^│╠ę¬ū±čŁ╚ńŽ┬ę╗ą®įŁätĪŻ
(1)£╩(zh©│n)éõļAČ╬ĪŻ├µī”(du©¼)ę╗ą®Å═(f©┤)ļsĄ─ŽĄĮy(t©»ng)Ģr(sh©¬)Ż¼╚╬äš(w©┤)▌^ųžĄ─ļAČ╬Š═╩Ū£╩(zh©│n)éõļAČ╬Ż¼ė╔ė┌ ę¬┼¬ŪÕå¢Ņ}Ą─▒│Š░Śl╝■Ż¼Į©┴ó─Żą═Ą──┐Ą─║═─Żą═ßśī”(du©¼)Ą──┐ś╦(bi©Īo)Ż¼£╩(zh©│n)éõļAČ╬ąĶę¬║─┘M(f©©i)┤¾┴┐ Ą─Š½┴”ĪŻŽ╚Ż¼ßśī”(du©¼)ę¬▀M(j©¼n)ąąĘų╬÷Ą─å¢Ņ}║═─Żą═Ż¼ę¬ū÷ĄĮī”(du©¼)Ųõ╦∙Üwī┘Ą─ŅI(l©½ng)ė“ĘŪ│Ż╩ņų¬Ż¼īóŲõęÄ(gu©®)äØĄĮ▒ŖČÓīW(xu©”)┐ŲųąĄ─ę╗ĘNĪŻ▓╗═¼Ą─ŅI(l©½ng)ė“Č╝ėąų°ūį╝║d╠žĄ─╠ž³c(di©Żn)Ż¼æ¬(y©®ng)«ö(d©Īng)ū÷ĄĮŠ▀¾w å¢Ņ}Š▀¾wĘų╬÷ĪŻŲõ┤╬Ż¼ę¬┤_Č©Į©─Ż╩Ū×ķ┴╦ū÷╩▓├┤,Į©─Ż▓╗āH┐╔ęįĮŌūx║═šf├„å¢Ņ}Ż¼Č° Ūę┐╔ęįŲĄĮŅA(y©┤)£y(c©©)Ą─ū„ė├ĪŻZ║¾Ż¼ßśī”(du©¼)Į©┴óĄ──Żą═▀xō±ę╗ĘN▌^×ķŪĪ«ö(d©Īng)?sh©┤)─ĮŌøQĘĮ╩ĮĪŻ
(2)ŽĄĮy(t©»ng)šJ(r©©n)ūR(sh©¬)ļAČ╬ĪŻŽ╚╩ŪŽĄĮy(t©»ng)Į©─ŻĄ──┐ś╦(bi©Īo)ĪŻ─Żą═Ą──┐ś╦(bi©Īo)▌^×ķųžę¬Ż¼╠žäe╩Ū ī”(du©¼)ė┌┤¾ČÓöĄ(sh©┤)Ą─øQ▓▀å¢Ņ}ęį╝░ā×(y©Łu)╗»ĘĮ├µĄ─å¢Ņ}ĪŻŲõ┤╬╩ŪŽĄĮy(t©»ng)Į©─ŻĄ─ęÄ(gu©®)ĘČĪŻ─Żą═å¢Ņ} ę╗Č©ę¬ęÄ(gu©®)ĘČ╗»Ż¼ę▓Š═╩Ūšfę¬Ė∙ō■(j©┤)─Żą═╠Ä└Ēå¢Ņ}Ą─ę¬Ū¾║═ę¬▀_(d©ó)ĄĮĄ──┐ś╦(bi©Īo)ųŲū„─Żą═ęÄ(gu©®) ĘČĪŻ╚╗║¾╩ŪŽĄĮy(t©»ng)Į©─ŻĄ─ę¬╦žĪŻ─Żą═ųą╦∙æ¬(y©®ng)╔µ╝░Ą─Ė„éĆ(g©©)ę¬╦žę¬Ž╚┤_Č©Ż¼┤_Č©ĘĮĘ© ┐╔ęįĮĶų·─Żą═─┐ś╦(bi©Īo)ęį╝░╔Žę╗▓ĮųąĮ©─ŻęÄ(gu©®)ĘČüĒīŹ(sh©¬)¼F(xi©żn)ĪŻZ║¾╩ŪŽĄĮy(t©»ng)Į©─ŻĄ─ĻP(gu©Īn)ŽĄ╝░ŲõŽ▐ ųŲĪŻ─Żą═ųąę▓Ųš▒ķ┤µį┌ų°ĻP(gu©Īn)ŽĄę¬Ū¾Ż¼▀@Š═╩╣Ą├Į©─Żš▀Ė∙ō■(j©┤)─Żą═ęÄ(gu©®)ĘČ║═─Żą═Ą─īŹ(sh©¬)ļH ╠ž³c(di©Żn)Ż¼ī”(du©¼)─Żą═┼c─Żą═ų«ķgĄ─ĻP(gu©Īn)ŽĄ║═ŽÓ╗źė░Ēæ▀M(j©¼n)ąąČÓ├µĄ─Įy(t©»ng)╗I║═Ęų╬÷Ż¼▀xō±│÷─Ūą®Z ×ķ▀m║ŽĄ─ę¬╦žŻ¼Å─Č°═Ļ│╔Į©─Ż▀^│╠ĪŻ
(3)ŽĄĮy(t©»ng)Į©─ŻļAČ╬ĪŻ ę╗éĆ(g©©)─Żą═┐╔ęį╩Ūī”(du©¼)¼F(xi©żn)īŹ(sh©¬)«ö(d©Īng)ųą─│éĆ(g©©)ŽĄĮy(t©»ng)Ą─ŽļŽ¾▒Ē╩ŠŻ¼╦∙ęįĮ©─ŻĄ─▀^│╠╩╝ĮKČ╝┼cą╬╩ĮėąĻP(gu©Īn)ŽĄĪŻę¬╦žūā┴┐ę¬į§śė▓┼┐╔ęį▒Ē╩Š│÷ę¬╦žįŁą═Ż¼ę¬╦ž ║═ūā┴┐ų«ķgĄ─ŽÓ╗źĻP(gu©Īn)ŽĄę¬╚ń║╬╚ź├Ķ╩÷Ż¼─Żą═Ą──┐ś╦(bi©Īo)║═ę¬╦žĄ─ūā┴┐ų«ķg╚ń║╬├Ķ╩÷Ż¼į§ ├┤╚ź▒Ē╩÷╝s╩°Śl╝■Ż¼ęį╝░ė├š¹¾wąįĄ─įŁät░čĖ„éĆ(g©©)Ęų▓┐Ęų▒Ē╩Š│÷üĒŻ¼╠žäe╩Ūī”(du©¼)ėąĻP(gu©Īn)ĘĮ├µ╚ń║╬▀M(j©¼n)ąą▌^║├Ą─öĄ(sh©┤)┴┐├Ķ╩÷Ą╚Ż¼╔Ž╩÷╠ߥĮĄ─ĘNĘNå¢Ņ}Č╝╩Ū─Żą═ą╬╩Į╗»Ą─▀^│╠Įø(j©®ng)│Ż ė÷ĄĮĄ─ĪŻ
Į©─Ż╝┘įO(sh©©)Ą─Ė„éĆ(g©©)Śl╝■ąĶę¬▀M(j©¼n)ę╗▓ĮĄž▀M(j©¼n)ąąĘų╬÷Ż¼Ą½╩Ū▀@ą®ę¬Į©┴óį┌ęčĮø(j©®ng)╠ß │÷Ą─Į©─Ż╝┘įO(sh©©)Ą─╗∙ĄA(ch©│)ų«╔Ž▓┼─▄ē“═Ļ│╔ĪŻŽ╚ąĶę¬▀M(j©¼n)ąąģ^(q©▒)ĘųĄ─Š═╩Ūūā┴┐Č╝ėą──ą®Ż¼ ęčų¬┴┐ėą──ą®Ż¼╬┤ų¬┴┐ėųėą──ą®ĪŻ╚╗║¾Ęų╬÷▀@ą®┴┐Ą─ŽÓ╗źū„ė├Ż¼╦³éāų«ķg┤µį┌ų°į§ śėĄ─ĻP(gu©Īn)ŽĄęį╝░╦³éāĄ─╬╗ų├Ż¼į┘▀xō±ę╗éĆ(g©©)║Ž▀mĄ─öĄ(sh©┤)īW(xu©”)╣żŠ▀Ż¼ĮĶų·ŪĪ«ö(d©Īng)?sh©┤)─Į©─ŻĘĮ╩ĮŻ¼Į? ┴ó│÷─▄ē“┐╠«ŗīŹ(sh©¬)ļHå¢Ņ}Ą─öĄ(sh©┤)īW(xu©”)─Żą═ĪŻ┼e└²üĒšfŻ¼Ī░Ž▓╠ŪĮ©─ŻĪ▒Ą─▀^│╠ųąŠ═╔µ╝░┴╦öĄ(sh©┤) īW(xu©”)─Żą═ųąĄ─ā╔┤¾╗∙▒ŠĘĮĘ©Ż║ę╗éĆ(g©©)╩ŪŽĄĮy(t©»ng)▒µūR(sh©¬)Ę©Ż╗┴Ēę╗éĆ(g©©)╩ŪÖC(j©®)└ĒĘų╬÷Ę©ĪŻÖC(j©®)└ĒĘų╬÷Ę© ╩Ūį┌ę╗Č©Ą─╗∙ĄA(ch©│)ų«╔Ž▀M(j©¼n)ąąĄ─Ęų╬÷Ż¼▀@ę╗╗∙ĄA(ch©│)Š═╩Ūī”(du©¼)īŹ(sh©¬)╬’ā╚(n©©i)▓┐ÖC(j©®)└ĒŽ╚▀M(j©¼n)ąą╠Į╦„Ż¼į┘║Ž └ĒĄž└¹ė├ŲõŪ░╠ߌl╝■║═─Żą═ą┼ŽóĄ├ĄĮZĮKĄ──Żą═Ż╗ŽĄĮy(t©»ng)▒µūR(sh©¬)Ę©ät┼cų«▓╗═¼Ż¼╦³ė├į┌ ī”(du©¼)ŽĄĮy(t©»ng)Ą─ā╚(n©©i)▓┐ÖC(j©®)└Ēę╗¤o╦∙ų¬Ą─ŪķørŽ┬Ż¼└¹ė├Į©─Ż╝┘įO(sh©©)╗“š▀╩ŪīŹ(sh©¬)ļHŪķørųąī”(du©¼)ŽĄĮy(t©»ng)×ķ £y(c©©)įćöĄ(sh©┤)ō■(j©┤)╦∙Įo│÷Ą─╩┬╬’ŽĄĮy(t©»ng)Ą─▌ö╚ļĪó▌ö│÷ą┼ŽóüĒĮ©┴ó─Żą═ĪŻ
░ķļSų°ėŗ(j©¼)╦ŃÖC(j©®)▀@ę╗īW(xu©”) ┐ŲĄ─▓╗öÓ░l(f©Ī)š╣Ż¼ėŗ(j©¼)╦ŃÖC(j©®)Ą──ŻöM╣”─▄ėąą¦Ąž┤┘▀M(j©¼n)┴╦öĄ(sh©┤)īW(xu©”)Į©─Ż▀@ę╗└ĒšōĄ─’w╦┘░l(f©Ī)š╣Ż¼ę▓ ųØu│╔×ķę╗ĘNĮ©įņ─Żą═Ą─Z×ķīŹ(sh©¬)ė├Ą─ĘĮĘ©Ż¼▀@ą®Į©─ŻĄ─ĘĮĘ©Č╝ėąĖ„ūįĄ─ķL(zh©Żng)╠ÄŻ¼ę▓┤µ į┌ę╗ą®▓╗ūŃų«╠ÄŻ¼ę“┤╦į┌śŗ(g©░u)įņ─Żą═Ą─▀^│╠ųą┐╔ęį═¼Ģr(sh©¬)▓╔ė├ČÓĘNĘĮĘ©Ż¼Å─Č°▀_(d©ó)ĄĮ╚ĪķL(zh©Żng) ča(b©│)Č╠Ą──┐Ą─ĪŻ
(4)─Żą═Ū¾ĮŌļAČ╬ĪŻ═Ļ│╔┴╦─Żą═Ą─▒Ē╩Š▀@ę╗╣żū„▓óø]ėąęŌ╬Čų°Į©─Ż╣żū„Š══Ļ │╔┴╦Ż¼┤╦Ģr(sh©¬)Z×ķĻP(gu©Īn)µIĄ─å¢Ņ}Š═ūā?y©Łu)ķ╚ń║╬│╔╣”Ąž└¹ė├įō─Żą═▀M(j©¼n)ąąėŗ(j©¼)╦ŃŻ¼▓óŪę▒ŻūCŪ¾ĮŌ Ą─│╔╣”ĪŻöĄ(sh©┤)īW(xu©”)─Żą═Į©┴ó═Ļ«ģ║¾Ż¼Ū¾ĮŌĄ─▀^│╠═∙═∙Ģ■(hu©¼)ė├ĄĮā╔ĘNĘĮĘ©Ż║ę╗ĘN╩Ūé„Įy(t©»ng)Ą─öĄ(sh©┤) īW(xu©”)ĘĮĘ©Ż╗┴Ēę╗ĘN╩Ū¼F(xi©żn)┤·Ą─öĄ(sh©┤)īW(xu©”)ĘĮĘ©ĪŻī”(du©¼)ė┌▌^×ķÅ═(f©┤)ļsĄ─ŽĄĮy(t©»ng)üĒšfŻ¼ę╗░ŃĄ─öĄ(sh©┤)īW(xu©”)ĘĮĘ©╩Ū ▀_(d©ó)▓╗ĄĮŪ¾ĮŌ▀@ę╗─┐ś╦(bi©Īo)Ą─Ż¼▀@Š═ąĶę¬ī”(du©¼)─Żą═Ą─╠ž³c(di©Żn)▀M(j©¼n)ąąįö▒MĄ─Ęų╬÷Ż¼įO(sh©©)ėŗ(j©¼)ę╗ĘN╦ŃĘ©╚╗ ║¾ŠÄīæ▄ø╝■░³Ż¼Z║¾ĮĶų·ėŗ(j©¼)╦ŃÖC(j©®)▀@ę╗╣żŠ▀═Ļ│╔─Żą═Ą─Ū¾ĮŌĪŻ
(5)─Żą═Ęų╬÷┼cÖz“×(y©żn)ĪŻĖ∙ō■(j©┤)Į©┴ó─Żą═Ģr(sh©¬)Ą──┐Ą─ę¬Ū¾Ż¼─Żą═Įø(j©®ng)▀^Ū¾ĮŌų«║¾«a(ch©Żn)╔· Ą─ę╗ŽĄ┴ąöĄ(sh©┤)ūųĮY(ji©”)╣¹┐╔ęį▀M(j©¼n)ąąŽÓæ¬(y©®ng)Ą─Ęų╬÷Ż¼╚ń▀M(j©¼n)ąąš`▓ŅĘų╬÷Īóķ_š╣ĘĆ(w©¦n)Č©ąįĘų╬÷Ą╚ĪŻ╚ń ╣¹Ęų╬÷Ą├ĄĮĄ─ĮY(ji©”)╣¹▓╗ØMūŃķ_╩╝įO(sh©©)Č©Ą─ę¬Ū¾Ż¼Š═ąĶę¬Ė³Ė─Į©─ŻĢr(sh©¬)║“╠ß│÷Ą─╝┘įO(sh©©)Śl╝■Ż¼ ╠ß│÷ę╗éĆ(g©©)╚½ą┬Ą──Żą═Ż¼ ę╗ų▒ĄĮZ║¾Ą─Ęų╬÷ØMūŃąĶŪ¾Ż¼═¼Ģr(sh©¬)┐╔ęį▀M(j©¼n)ąąā×(y©Łu)╗»Ą╚ĘĮ├µĄ─ ėæšō ĪŻ
ī”(du©¼)ė┌ŽĄĮy(t©»ng)Ą─š¹¾wĘų╬÷║═Ę■äš(w©┤)üĒšfŻ¼ų„ę¬ė╔öĄ(sh©┤)īW(xu©”)─Żą═Ą─Į©┴óüĒ═Ļ│╔Ż¼─▄ē“?q©▒)óŽĄĮy(t©»ng) Ą─┐═ė^īŹ(sh©¬)ļHŪķørĮŌßī│÷üĒŠ═╩Ū┼ąöÓ─Żą═║├ē─Ą─ś╦(bi©Īo)£╩(zh©│n)ĪŻ╚ń╣¹Įø(j©®ng)▀^ę╗ŽĄ┴ąĄ─Ęų╬÷ų«║¾ ░l(f©Ī)¼F(xi©żn)─Żą═Ę¹║Žę¬Ū¾Ż¼┤╦Ģr(sh©¬)Š═ąĶę¬Ė∙ō■(j©┤)īŹ(sh©¬)ļHŪķørį┘╝ėęįÖz“×(y©żn)Ż¼╚¶▓╗Ę¹║ŽŻ¼ätąĶę¬▀M(j©¼n)ąą ═Ļ ╔Ų ĪŻ
 |
| ╔╠ė├ÖC(j©®)Ų„╚╦ Disinfection Robot š╣ÅdÖC(j©®)Ų„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖC(j©®)Ų„╚╦Ąū▒P ėŁ┘eÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦Ąū▒P ųvĮŌÖC(j©®)Ų„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖC(j©®)Ų„╚╦ ┤¾Ų┴ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®)Ų„╚╦ Ę■äš(w©┤)ÖC(j©®)Ų„╚╦Ąū▒P ųŪ─▄╦═▓═ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®) ÖC(j©®)Ų„╚╦OEM┤·╣żÅS Ž¹ČŠÖC(j©®)Ų„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖC(j©®)Ų„╚╦ łDĢ°^ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ę²ÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)Ž¹ČŠÖC(j©®)Ų„╚╦ ī¦(d©Żo)į\ÖC(j©®)Ų„╚╦ ėŁ┘eĮė┤²ÖC(j©®)Ų„╚╦ Ū░┼_(t©ói)ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ė[ÖC(j©®)Ų„╚╦ ŠŲĄĻ╦═╬’ÖC(j©®)Ų„╚╦ įŲ█E┐Ų╝╝ØÖ(r©┤n)ÖC(j©®)Ų„╚╦ įŲ█EŠŲĄĻÖC(j©®)Ų„╚╦ ųŪ─▄ī¦(d©Żo)į\ÖC(j©®)Ų„╚╦ |