
╗∙ė┌ęĢėXĄ─═¼ĢrČ©╬╗┼cĄžłD╔·│╔ĘĮĘ©(vSLAM) į┌ę╗Č©│╠Č╚╔ŽĮŌøQ┴╦FastSLAMĄ─╔Ž╩÷▓╗ūŃŻ¼įŁę“╩Ūį┌ęĢėXłDŽ±ųą░³║¼┴╦▒╚╝ż╣Ōé„ĖąöĄō■Ė³╝ėžSĖ╗Ą─ŁhŠ│ą┼ŽóĪŻVSLAMĄ─╠ß│÷Ą├ęµė┌ęĢėXłDŽ±╠Ä└Ē╝╝ągĄ─░lš╣Ż¼Lowe Ą╚╚╦╠ß│÷┴╦ę╗ĘN▒╚└²▓╗ūā╠žš„ūāōQ(Scale Invariant Feature Transform,SIFT)73,└¹ė├įōĘĮĘ©╠ß╚ĪĄ─╠žš„║åĘQ×ķSIFT ╠žš„ĪŻ┼cÅ─ęĢ ėXłDŽ±╗“╝ż╣Ōą┼Žóųą╠ß╚ĪĄ─ų▒ŠĆĪóĮŪ³c╠žš„ŽÓ▒╚Ż¼SIFT ╠žš„ī”ė┌łDŽ±Ą─┐sĘ┼ĪóęĢĮŪĪó╣ŌÅŖĄ╚ūā╗»Š▀ėą▌^║├Ą─▓╗ūāąįŻ¼▀@ęŌ╬Čų°SIFT╠žš„Š▀ėąĖ³ÅŖĄ─¶ö░¶ąįŻ¼į┌öĄō■ĻP┬ō▀^│╠ųą▓╗╩▄ŁhŠ│╣Ōššūā╗»ĪóŁhŠ│Šų▓┐Ė─ūāĪó╠žš„▓┐Ęųš┌ō§ęį╝░ÖCŲ„╚╦ė^▓ņęĢĮŪĄ─ė░ĒæĪŻ
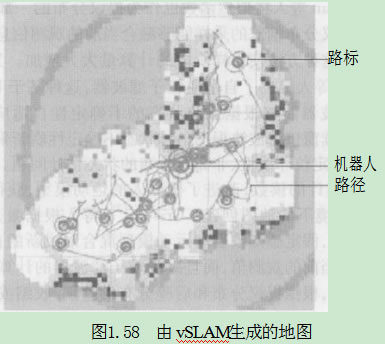
Rao-Blackwellized ┴Żūė×V▓©Ų„ę“╩ĮĘųĮŌ╝╝ąg═¼śė▒╗vSLAM╦∙▓╔ė├Ż¼╦∙ęįvSLAMę▓ ┐╔ęįĘQ×ķ╗∙ė┌ęĢėXĄ─FastSLAMĪŻė╔ ė┌vSLAM╦∙╩╣ė├Ą─┬Ęś╦╠žš„×ķSIFT ╠žš„Ż¼Č°├┐ę╗éĆ SIFT ╠žš„ėųŠ▀éõģ^äeė┌Ųõ╦¹╠žš„Ą─ąį─▄(Distinctive), ¤ošōÅ─ĄžłDäōĮ©▀Ć╩ŪÅ─īŹļHæ¬ė├Ą─ĮŪČ╚üĒšfŻ¼vSLAMį┌öĄō■ĻP┬ō╔ŽĄ─┐╔▓┘ū„ąįę¬ā×ė┌FastSLAMĪŻš²╚ń╬─½I[74]ųą╠ߥĮŻ¼ į┌ vSLAM ųąŻ¼ÖCŲ„╚╦Š▀ėą▌^ÅŖĄ─Ī░šT╣š╗ųÅ═Ī▒─▄┴”ĪŻų„ę¬įŁę“╩Ūė╔vSLAM╔·│╔Ą─ĄžłDųą (╚ńłD1.58╦∙╩Š)┤µį┌Å─ęĢėXłDŽ±ųą╠ß╚ĪĄ─┬Ęś╦ĪŻ«öÖCŲ„╚╦įŌė÷šT╣šĢrŻ¼Ģ■Ė∙ō■┬Ęś╦Ųź ┼õÅ─šT╣šųą╗ųÅ═▀^üĒĪŻ
vSLAM═¼śėėąŲõ▓╗ūŃų«╠ÄŻ¼š²╚ńŪ░╬─╦∙šfŻ¼vSLAMĮĶų·ė┌SIFT ╠žš„Ą─╠ß╚Ī║═Ųź┼õŻ¼ «ö╬┤ų¬ŁhŠ│ųąĄ─SIFT ╠žš„▌^×ķžÜĘ”ĢrŻ¼ÖCŲ„╚╦īóļyęįäōĮ©£╩┤_Č╚▌^Ė▀Ą─ŁhŠ│ĄžłDĪŻōQŠõ įÆšfŻ¼┐╝æ]─│ą®śOŽ▐ŪķørŻ¼«öų▄ć·Ą─ŁhŠ│×ķ╝ā╔½ĢrŻ¼vSLAM īó¤oĘ©š²│Ż╩╣ė├ĪŻČ°į┌Ąõą═Ą─ ╩ęā╚╗“╩ę═ŌŁhŠ│ųąŻ¼ė╚Ųõ╩ŪŁhŠ│▌^×ķ╗ņüyĢrŻ¼vSLAMģsŠ▀ėą┴╝║├Ą─ąį─▄Ż¼▀@┼cFastSLAM ą╬│╔┴╦§r├„Ą─ī”ššĪŻ
vSLAMĄ─┴Ēę╗éĆ▓╗ūŃų«╠Ä╩Ūļyęį╠ß╣®šŽĄK╬’£╩┤_Ą─ŽÓī”ū°ś╦Ż¼▀@ęŌ╬Čų°ė╔vSLAMäō Į©Ą─ŁhŠ│ĄžłDį┌Š½Č╚╔Žę¬┴ėė┌FastSLAMĪŻę“┤╦Ż¼ėąą®čąŠ┐š▀▓╔ė├ļp─┐┴ó¾węĢėX╠ßĖ▀ĄžłD äōĮ©Ą─Š½Č╚ĪŻĄ½ė╔ė┌ęĢėXłDŽ±į┌╔ŅČ╚ą┼Žó╔ŽĄ─üG╩¦Ż¼ęĢėXČ©╬╗Š½Č╚╚į╚╗╩▄ĄĮłDŽ±Ųź┼õ║═ özŽ±ÖCģóöĄąŻš²Ą─ė░ĒæĪŻ
vSLAM Ą─Z║¾ę╗éĆ▓╗ūŃų«╠Ä╩Ū┤¾ęÄ─ŻŁhŠ│Ą─ĄžłD┤µā”å¢Ņ}ĪŻį┌║╬Ģr║╬╠ÄÅ─ŁhŠ│ųą ╠ß╚Ī╠žš„╚į╚╗╩Ūę╗éĆžĮĒÜĮŌøQĄ─å¢Ņ}ĪŻ¼Fį┌▌^×ķ│Żė├Ą─ĘĮĘ©╩Ū▓╔ė├Č©ŠÓļxĘĮ╩Į½@╚Ī SIFT ╠žš„ĪŻę▓Š═╩ŪÖCŲ„╚╦├┐ęŲäėę╗Č╬ŠÓļx╚╗║¾═ŻŽ┬üĒÅ─įōĄž³cĄ─¢|─Ž╬„▒▒╦─éĆĘĮŽ“½@╚Īł÷Š░łDŽ±▓ó╠ß╚ĪSIFT ╠žš„ū„×ķ┬Ęś╦ĪŻė╔ė┌├┐ę╗éĆł÷Š░░³║¼Äū╩«ĄĮ╔Ž░┘éĆSIFT ╠žš„Ż¼ į┌┤¾ęÄ─ŻŁhŠ│Ž┬Ą─ĄžłDŠ½Č╚╝░ĄžłDęÄ─Ż╩ŪąĶę¬ÖÓ║ŌĄ─ę╗ī”├¼Č▄ĪŻÅ─æ¬ė├Ą─ĮŪČ╚üĒšfŻ¼į┌ vSLAMųąĄ─╠žš„╠ß╚Ī║═╠žš„Ųź┼õŠ▀ėą▌^Ė▀Ą─ėŗ╦Ńžōō·Ż¼╚ń║╬▒ŻūCÖCŲ„╚╦į┌vSLAM╦∙äōĮ© ĄžłDųąī¦║ĮĢrĄ─īŹĢrąį╩Ūę╗éĆ▓╗┐╔║÷┬įĄ─å¢Ņ}ĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |