| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
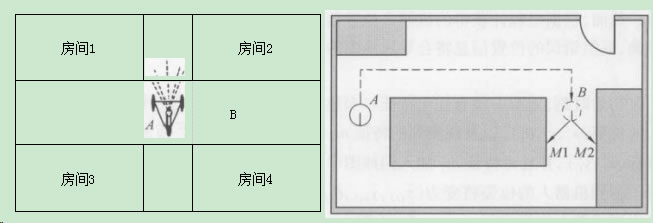
ÖCŲ„╚╦═©▀^═Ō▓┐é„ĖąŲ„ą┼Žó½@Ą├ ų▄ć·ŁhŠ│ŽÓī”╬╗ų├ą┼ŽóüĒ┤_Č©ūį╔Ē╬╗ū╦Ą─▀^│╠ĪŻį┌╚½ŠųČ©╬╗ųąŻ¼ė╔ė┌ÖCŲ„╚╦ų╗─▄ė^£yĄĮ ŁhŠ│ųąĄ─ę╗ą®Šų▓┐ą┼ŽóŻ¼ę“Č°ŁhŠ│Ą─ī”ĘQąį┐╔─▄Ģ■╩╣ÖCŲ„╚╦į┌║▄ČÓ▓╗═¼Ą─╬╗ų├½@Ą├═Ļ╚½ ŽÓ═¼Ą─ė^£yą┼ŽóŻ¼«a╔·ČÓéĆ┐╔─▄Ą─ÖCŲ„╚╦╬╗ū╦╝┘įOĪŻ╚½ŠųČ©╬╗ųąÖCŲ„╚╦╬╗ū╦Ą─║¾“×Ė┼┬╩ Ęų▓╝╩Ūę╗éĆČÓĘÕĘų▓╝Ż¼╗∙ė┌Ė▀╦╣Ęų▓╝Ą─▓╗┤_Č©ąį▒Ē╩ŠĘĮĘ©▓╗▀mė├ė┌╚½ŠųČ©╬╗ĪŻį┌╚½ŠųČ© ╬╗▀^│╠ųą╚ń╣¹į┌ęŲäėÖCŲ„╚╦└’│╠ėŗø]ėąėøõøĄ─ŪķørŽ┬Ż¼īóÖCŲ„╚╦Å─ę╗éĆĄžĘĮ░ߥĮ┴Ē═Ōę╗ éĆĄžĘĮĢ■«a╔·ÖCŲ„╚╦Ī░šT╣šĪ▒(Kidnapped Robot)¼FŽ¾[148]ĪŻ
«öīóÖCŲ„╚╦Å─A³c░ߥĮB ³cĢrŻ¼ÖCŲ„╚╦└’│╠ėŗ¤oĘ©ėøõøīŹļH╬╗ū╦ūā ╗»ĪŻĖ∙ō■é„ĖąŲ„ą┼ŽóŻ¼ÖCŲ„╚╦ę▓▓╗─▄┴ó┐╠┤_Č©ūį╝║į┌ŁhŠ│ųąĄ─╬╗ų├Ż¼ąĶę¬Ė∙ō■ČÓ┤╬ė^£yą┼ Žóųžą┬Č©╬╗ĪŻ╦∙ęį║▄ČÓ蹊┐š▀šJ×ķÖCŲ„╚╦Ī░šT╣šĪ▒å¢Ņ}ę▓╩Ūę╗éĆÖCŲ„╚╦Ą─╚½ŠųČ©╬╗å¢ Ņ}ĪŻ┼c╚½ŠųČ©╬╗▓╗═¼Ą─╩ŪŻ¼ÖCŲ„╚╦┐╔─▄▓╗ų¬Ą└ūį╝║╩▓├┤Ģr║“░l╔·┴╦Ī░šT╣šĪ▒,įōĘĮĘ©│Żė├ üĒ£yįćČ©╬╗ĘĮĘ©Ą─¶ö░¶ąįĪŻį┌╚½ŠųČ©╬╗▀^│╠ųąŻ¼┤µį┌║▄ČÓ▓╗┤_Č©ąįę“╦žĪŻŽ╚╩ŪÖCŲ„╚╦ ▒Š╔ĒĄ─▓╗┤_Č©ąįŻ¼╚ń▌åūė┤“╗¼╦∙įņ│╔Ą─└’│╠ėŗš`▓Ņ└█ĘeŻ¼é„ĖąŲ„įļ┬Ģ╦∙įņ│╔Ą─ūxöĄ▓╗┐╔ ą┼ĪŻŲõ┤╬╩ŪÖCŲ„╚╦╦∙╠ÄĄ─ŁhŠ│ę▓╩Ū▓╗┐╔ŅAų¬Ą─Ż¼╚ń╚╦Ą─ū▀äė║═╬’¾wĄ─ęŲäė╦∙įņ│╔Ą─ŁhŠ│ ūā╗»ĪŻ▀@ą®▓╗┤_Č©ąįĢ■╩╣Č©╬╗ūāĄ├Ė³╝ė└¦ļyĪŻę“┤╦Ż¼Į³üĒįĮüĒįĮČÓĄ─蹊┐š▀ę╗ĘĮ├µ▓╔ė├ ┐╔┐┐Ą─é„ĖąŲ„Ż¼╚ń▓╔ė├─▄Ėąų¬žSĖ╗ŁhŠ│ą┼ŽóĄ─ęĢėXé„ĖąŲ„║═£yŠÓŠ½Č╚▌^Ė▀Ą─╝ż╣Ō£yŠÓŲ„Ż╗ ┴Ēę╗ĘĮ├µ░čĖ┼┬╩└Ēšōæ¬ė├ĄĮęŲäėÖCŲ„╚╦Č©╬╗ųąŻ¼įćłD▓╔ė├Ė┼┬╩Č©╬╗ĘĮĘ©ĮŌøQ▓╗┤_Č©ąįå¢ Ņ}ĪŻ
SLAMĄ─╗∙▒ŠįŁ└Ē╩Ū└¹ė├ęčĮøäōĮ©Ą─ĄžłDą▐š²╗∙ė┌▀\äė─Żą═Ą─ÖCŲ„╚╦╬╗ū╦╣└ėŗš`▓ŅŻ¼╠ßĖ▀Č©╬╗Š½Č╚Ż╗═¼ĢrĖ∙ō■┐╔┐┐Ą─ÖCŲ„╚╦╬╗ū╦Ż¼äōĮ©│÷Š½Č╚Ė³Ė▀Ą─ĄžłD[149]ĪŻ
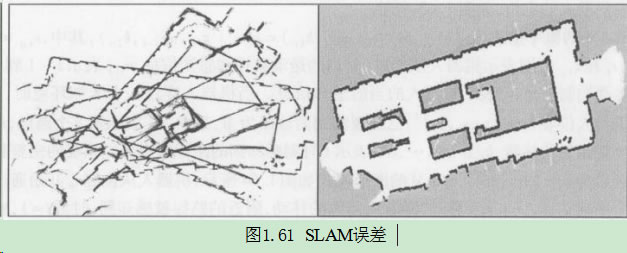
╬┤ų¬ŁhŠ│Ž┬Ą─SLAMĘĮĘ©Ą─║╦ą─Č╝╩Ūć·└@║═ßśī”é„ĖąŲ„ą┼Žó║═ŁhŠ│ųą┤µį┌Ą─▓╗┤_Č© ąįČ°š╣ķ_Ą─ĪŻĻPė┌é„ĖąŲ„Ą─▓╗┤_Č©Ż¼ęįZ│Żė├Ą─└’│╠ėŗ×ķ└²Ż¼ŲõĄõą═Ą─š`▓ŅĘe└█╚ńłD1.61 ╦∙╩ŠĪŻŲõųąŻ¼ū¾łD╩Ūd┴ó└¹ė├└’│╠ėŗČ©╬╗Īód┴ó└¹ė├╝ż╣Ōé„ĖąŲ„Ėąų¬ŁhŠ│╦∙äōĮ©Ą─ĄžłDŻ¼ ė╔ė┌ø]ėą▀Mąą└’│╠ėŗš`▓ŅčaāöŻ¼Äū┤╬äōĮ©Ą─ĄžłD▓Ņ«É║▄┤¾Ż¼┼cīŹļHŁhŠ│ę▓▓╗Ę¹Ż╗ėęłD╩Ū▓╔ė├SLAM äōĮ©Ą─ĄžłDŻ¼╗∙ė┌SLAM ┐╔ęį└¹ė├ęčäōĮ©Ą─ĄžłDą▐š²└’│╠ėŗĄ─š`▓ŅĪŻ▀@śėÖCŲ„ ╚╦Ą─╬╗ū╦š`▓ŅŠ═▓╗Ģ■ļSų°ÖCŲ„╚╦Ą─▀\äėŠÓļxĄ─į÷┤¾Č°¤oŽ▐ųŲį÷ķLŻ¼ę“┤╦┐╔ęįäōĮ©Š½Č╚Ė³ Ė▀Ą─ĄžłDŻ¼ę▓═¼ĢrĮŌøQ┴╦╬┤ų¬ŁhŠ│ųąĄ─ÖCŲ„╚╦Č©╬╗å¢Ņ}ĪŻ
į┌SLAMųąŻ¼ŽĄĮyĄ─ĀŅæBė╔ÖCŲ„╚╦Ą─╬╗ū╦║═Ąž łDą┼Žó(░³║¼Ė„╠žš„ś╦ųŠĄ─╬╗ų├ą┼Žó)ĮM│╔ĪŻ╝┘įO ÖCŲ„╚╦į┌t Ģr┐╠ė^£yĄĮ┴╦╠žš„m₁, ╚ńłD1 . 62╦∙ ╩ŠĪŻĖ∙ō■ė^£yą┼Žóų╗─▄½@Ą├╠žš„m₁ į┌ÖCŲ„╚╦ū°ś╦ ŽĄR ųąĄ─ū°ś╦Ż¼ÖCŲ„╚╦ąĶę¬╣└ėŗÖCŲ„╚╦ūį╝║▒Š╔Ēį┌ ╩└Įńū°ś╦ŽĄWųąĄ─╬╗ū╦Ż¼╚╗║¾═©▀^ū°ś╦ūāōQ▓┼─▄ ėŗ╦Ń╠žš„Ą─╩└Įńū°ś╦ĪŻ┐╔ęŖŻ¼į┌ĄžłDäōĮ©Ą─▀^│╠ ųąŻ¼ąĶę¬ėŗ╦ŃÖCŲ„╚╦Ą─╬╗ū╦Ż¼ę▓Š═╩Ū▀MąąÖCŲ„╚╦Ą─ Č©╬╗ĪŻ╚╗Č°Ż¼Ė∙ō■└’│╠ėŗ½@Ą├Ą─ÖCŲ„╚╦╬╗ų├ą┼Žó║▄ ▓╗£╩┤_Ż¼’@╚╗Õeš`Ą─╬╗ų├ą┼ŽóīóĢ■ī¦ų┬ĄžłDĄ─▓╗£╩ ┤_ĪŻ
į┌│§╩╝Ģr┐╠Ż¼ĄžłDųąø]ėą╚╬║╬╠žš„ĪŻ«öÖCŲ„╚╦į┌t Ģr┐╠ė^£yĄĮ╠žš„m ĢrŻ¼┐╔ęįĖ∙ō■ÖC Ų„╚╦Ą─╬╗ū╦(x,y:,”╚.), ęį╝░ė^£yĄĮĄ─╠žš„m₁ į┌ÖCŲ„╚╦ū°ś╦ŽĄŽ┬Ą─ū°ś╦ėŗ╦Ń│÷╠žš„Ą─╩└ Įńū°ś╦(x¹,y!), ▓óŪęīó╠žš„m₁ ╝ė╚ļĄĮĄžłDųąĪŻ«öÖCŲ„╚╦▀\äėę╗▓Įų«║¾Ż¼Ė∙ō■└’│╠ėŗą┼Žó ┐╔ęįŅA£yĄĮÖCŲ„╚╦Ą─╬╗ū╦īóūā×ķ(x+1,Y:+1,0,+1)ĪŻĖ∙ō■╠žš„m₁ Ą─╩└Įńū°ś╦(x¹,y) ┐╔ ęį ėŗ╦Ń│÷«öÖCŲ„╚╦╬╗ū╦×ķ(x:+1,y:+1,0.+1) Ģr m₁ į┌ÖCŲ„╚╦ū°ś╦ŽĄŽ┬Ą─ū°ś╦ĪŻ╚╗Č°Ż¼ÖCŲ„╚╦═¼ Ģrę▓Ģ■į┘┤╬ė^£yĄĮ╠žš„m, Č°Ūę½@Ą├m₁ į┌ą┬Ą─ÖCŲ„╚╦ū°ś╦ŽĄŽ┬Ą─ū°ś╦(x+1,y+1) ĪŻ īŹ ļH ė^£yĄĮĄ─╠žš„ū°ś╦┼cėŗ╦Ń½@Ą├Ą─ū°ś╦(x^+1,y+1) īó┤µį┌▓ŅäeĪŻ▀@ĘN▓Ņäe╩Ūė╔ā╔ĘNįŁę“ę² ŲĄ─Ż¼Ųõę╗╩Ūę“×ķÖCŲ„╚╦Ą─ŅA£y╬╗ū╦(x:+1,y:+1,0+1)▓╗£╩┤_Ż¼ŲõČ■╩Ūę“×ķĖ∙ō■ęįŪ░Ą─ė^£y ą┼Žóėŗ╦Ń½@Ą├Ą─╠žš„Ą─╩└Įńū°ś╦(x¹,y¹) ▓╗£╩┤_ĪŻį┌SLAMųąŻ¼Ė∙ō■▀@ĘN▓Ņäeųžą┬ėŗ╦Ń╠ž š„Ą─╩└Įńū°ś╦(ę▓Š═╩ŪĄžłDäōĮ©),═¼Ģrųžą┬╣└ėŗÖCŲ„╚╦Ą─╬╗ū╦(ę▓Š═╩ŪÖCŲ„╚╦Ą─Č©╬╗)ĪŻ «öÖCŲ„╚╦└^└m▀\äėĢrŻ¼╦³īóė^£yĄĮĖ³ČÓĄ─╠žš„Ż¼Ė∙ō■═¼śėĄ─ĘĮĘ©Ż¼ÖCŲ„╚╦Ģ■░č╦³éā╝ė╚ļĄĮ ĄžłDųąŻ¼▓óŪęĖ∙ō■ė^£yĄĮĄ─ą┼ŽóĖ³ą┬ÖCŲ„╚╦Ą─╬╗ū╦ęį╝░╦³éāĄ─╩└Įńū°ś╦ĪŻ║åå╬ĄžšfŻ¼ SLAM└¹ė├ė^£yĄĮĄ─╠žš„ėŗ╦Ń╦³éāĄ─╩└Įńū°ś╦ęįīŹ¼FĄžłDäōĮ©Ż¼═¼ĢrĖ³ą┬ÖCŲ„╚╦Ą─╬╗ū╦ ęįīŹ¼FÖCŲ„╚╦Ą─Č©╬╗Ż¼╚ńłD1.63╦∙╩ŠĪŻ
SLAM Ą─Ė┼┬╩├Ķ╩÷×ķŻ║p(81,MI z1:,uo:,k1)=p(x,I z1:,u₀:-1,k1:),ŲõųąŻ¼s1:=81, S2, ĪŁ ,s, ║═z1: Ęųäe▒Ē╩ŠÖCŲ„╚╦Å─1ĄĮt Ģr┐╠Ą─▀\äė┬ĘÅĮ║═Ėąų¬ą┼ŽóŻ¼u₁-1▒Ē ╩Št-1 ĄĮ t Ģr ┐╠Ą─▀\äė┐žųŲą┼ŽóŻ¼z, ▒Ē╩ŠÖCŲ„╚╦Ą─«öŪ░Ėąų¬ą┼ŽóĪŻ«öÖCŲ„╚╦┤®▀^ę╗éĆ╬┤ų¬ŁhŠ│ĢrŻ¼įOt Ģr┐╠ÖCŲ„╚╦╬╗ū╦s,=[x₁,y:,”╚,], ęčĮøė^£yĄĮĄ─ĄžłD×ķM, ŲõųąŻ¼m ▒Ē╩ŠĄ┌k éĆ┬Ęś╦Ż¼K▒Ē ╩ŠęčĮøė^£yĄ─┬Ęś╦öĄŻ¼k,Ī╩{1,ĪŁ,N} ▒Ē╩Št Ģr┐╠Ėąų¬ĄĮĄ─┬Ęś╦╦„ę²╠¢ĪŻ
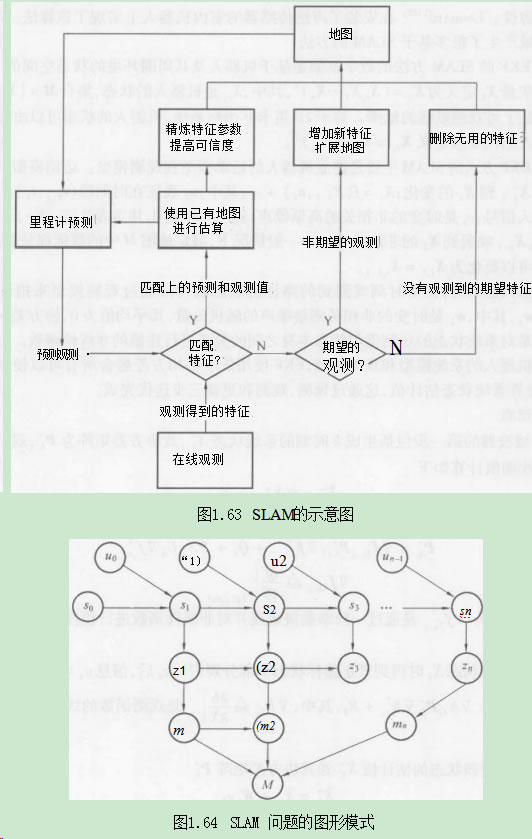
ŽĄĮyĄ─═Ļš¹ĀŅæB ┐╔ęį▒Ē╩Š×ķx,=[s1,M]T,SLAM Ą─łDą╬─Ż╩Į╚ńłD1.64╦∙╩ŠŻ¼ÖCŲ„╚╦Å─╬╗ū╦sĪŻķ_╩╝═©▀^┐ž ųŲ├³┴Ņą“┴ąuo,u₁,ĪŁ,u1-1 ęŲäėŻ¼ļSų°ÖCŲ„╚╦Ą─ęŲäėŻ¼ĖĮĮ³Ą─┬Ęś╦▒╗Ėąų¬ĄĮŻ¼Ģr┐╠t=1, Ėą ų¬ ĄĮ┬Ęś╦m₁, ▓ó½@Ą├£y┴┐öĄō■z₁ (░³└©ŠÓļx║═ĘĮŽ“),Ģr┐╠t=2, Ėąų¬ĄĮ┬Ęś╦m₂, ▓óį┌Ģr┐╠t=3,ųžą┬Ėąų¬ĄĮ┬Ęś╦m₁, ¼Fį┌ęčĮøą╬│╔Ą─ĄžłD×ķŻ║M={m₁,m₂,m ĪŻSLAM Ą─▌ö╚ļą┼Žó╩ŪŻ¼ ┬Ęś╦ė^£yą┼Žóz1:, ęį╝░▀\äė┐žųŲą┼Žóu₀:-1 ĪŻSLAM Ą──┐Ą─╩ŪŻ¼Ė∙ō■▌ö╚ļą┼Žó╣└ėŗÖCŲ„╚╦ ▀\äė┬ĘÅĮs1 ęį╝░ĄžłDMĪŻ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äšÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ š╣ÅdÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖCŲ„╚╦ ųŪ─▄┼õ╦═ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |